

The dynamically relaxed body - availability
Long term, our body, as mentioned in the first place, should be maintained to its normal position (straight, upright, body limbs to their normal extent). At the same time it should remain dynamically relaxed to be able to react appropriately to the forces exerted on it. Let us remember that every power that exceeds the minimum strength of the contact forces (or should be forced) to move the body towards its execution direction.
An important element that affects body movement, is the mass in combination with the "technical" characteristics (muscles, joints). Just consider the following: you hold your child by the hand and walk down the street. Suddenly you have to pull the child towards you. Pulling your hand with a force, the child's body will move with the following order: first the child will stretch his hand (the one you hold), then his body will turn around the symmetry axis and eventually his body will follow, unsticking his back foot from the ground (if the movement is big). This is a normal movement of a relaxed body. This movement is influenced by the mass of the body under the laws of physics related with the inertia of a body. Apparently when the effect of power to his body is finished,the child's body will balance and gradually return to it's normal posture.
This kind of kinesiology we're trying to conquer in Aikido, meaning, the body is dynamically relaxed to react to external stimuli moving properly and reverted to its normal state as soon as they cease to exist. The term we use in Aikido is to be available.
The dynamically relaxed body - Virtual springs
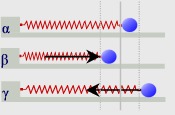 Let's
picture a spring (image a). If we compress it (image b) it
accumulates energy which is released to it's free end, as
soon as the power compression cease to exert. Same energy is
released if you stretch the spring (image c).
Let's
picture a spring (image a). If we compress it (image b) it
accumulates energy which is released to it's free end, as
soon as the power compression cease to exert. Same energy is
released if you stretch the spring (image c).
We use this practical example of springs' function in practice to guide our body in a motion to maintain the contact while being in a state of dynamic relax.
So imagine a spring which one end is located in the area of plain action of the hand (watch here) while the other end is at the gravity center of the body. The movement of the body is activated by the forces applied to the action point (=contact point).

 In
a similar way we can imagine a torsion spring which is
located at the hip level and the center of the spring is at
the body's gravity center. The spring is compressed or
stretched depending on the rotation of the hips.
In
a similar way we can imagine a torsion spring which is
located at the hip level and the center of the spring is at
the body's gravity center. The spring is compressed or
stretched depending on the rotation of the hips.
So, for example,in Katate Dori attack if one of the two roles e.g. the attacker pushes horizontally the action point towards the body of the other role-partner, in this case the defender, then the virtual spring will compress. As a result the energy accumulated will be released towards the free point which is the gravity center of body, which subsequently will move the body to the same direction. Similarly if the attacker pulls the contact point, then the spring will be stretched and this would result, a subsequent body move to the same direction.
Similarly, if the attacker raises the action point, then the virtual spring will pull the center of gravity upward and if he lowers the action point, it will also lowers the center of gravity.
In all cases, the following basic principles do apply: a) long term the virtual spring will have to come back to it's normal size, b) when the body receives an external energy, it moves -because of inertial- always a little bit later, (as a result of enhanced mass available) while it dissipates energy when it is moving first and c) the contact point does not move, it is regarded as a fixed point and that has as result the rest of the body to move compared to that.
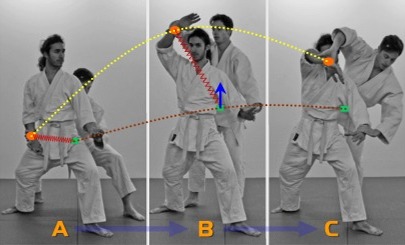
In the next picture, we see snapshots of the technique Ushiro Ryote Dori Kokyu Nage. In position A we presume that the virtual spring have it's normal size (green point = gravity center, orange point = contact point). As the nage develops his move, he raises the first contact point (position [B)] which results the stretch of the virtual spring. The free end of the spring, which is placed in the gravity center, pushes up the gravity center having as a natural consequence, the elevation of the body.
In position C the movement of the contact is driven forward and this has as consequence to create a torque on the gravity center of the uke and therefore the uke's body rotates around its center. The virtual spring will pull forward the gravity center of the uke. For the other contact point, we do similar thoughts.
The inertia of the body
The inertia significantly affects the kinesiology of the bodies of two roles during a technique. As already mentioned, every natural object in order to be set in motion should accept that power to overcome resistance due to inactivity. Once the body is set in motion, a force which can keep it in motion is less than the initial. In a similar way to change the motion of a physical object, for example to accelerate or decelerate (even possibly to stop) then you need to exercise powers which depend on its mass. The greater the mass the greater force must be applied. So we understand that our limbs require smaller forces to change their kinetic energy than the body, as the body has more mass.
Finally, you should bear in mind that parts of our body because of the perceived inaction, realize the energy being performed on them with dealy. This delay is as greater as the greater mass.
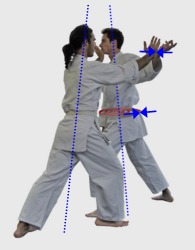
In the following snapshots, it is shown an example of how body parts perceive the body changes that occur (as a result of forces acting on it). In Katate Dori attack, both bodies come into contact instantaneously (figure A). Although in the contact point, uke's hand, stops it's movement, his body (because of the greater mass) it takes a long time to realize that change and therefore it continues its movement. Assuming that the contact point does not move the body of the uke,substantially, is compressed on it (images B and C).
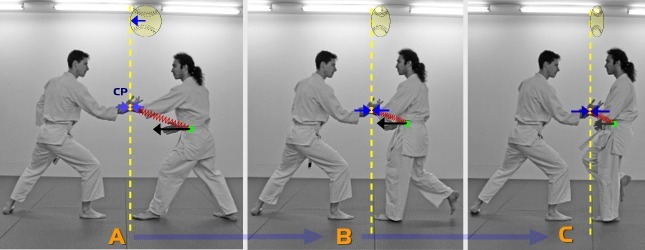
As the body of the uke is compressed into the contact point the virtual spring is compressed too. The energy that is stored in the spring, gradually balances the body's energy, which slows down and instantaneously stops.(Figure C).
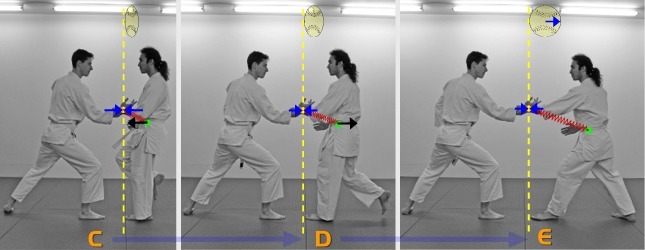
The energy of the spring is released to the free end (we remind that is located in the gravity center of uke) which has as a consequence, the uke's body, to begin to move in the opposite direction. Eventually the energy is exhausted and the uke's body gradually stops (figure E). In the final position the contact is maintained with the minimun power.
For the reader who is unfamiliar with this type of approach, (meaning through natural laws) he can imagine a tennis ball we toss into the wall. The ball as it comes in contact with the wall, it deforms due to its elasticity and recovers its original shape bouncing back.
Practicing with this approach it creates the perception of availability and a sense of contact throughout the duration of a technique. The student finds it logical keeping the contact and following the kinesiology of the partner. After some systematic training the sense of contact and availability work automatically. The trainee should keep in mind that the kinesiology should always travel within reason as having the priciple that the body should be kept as close as possible to its normal position and that the motion should be the result of forces acting on it (cause and effect relation).
In all cases of contact the trainee should have in mind the philosophy of the contact as described in sections Aikido: The Contact, 11/2011 and Aikido: The contact during the technique, 12/2011.